




ANRA UTM Powers NASA Langley’s Project focused on safe drone integration into NAS
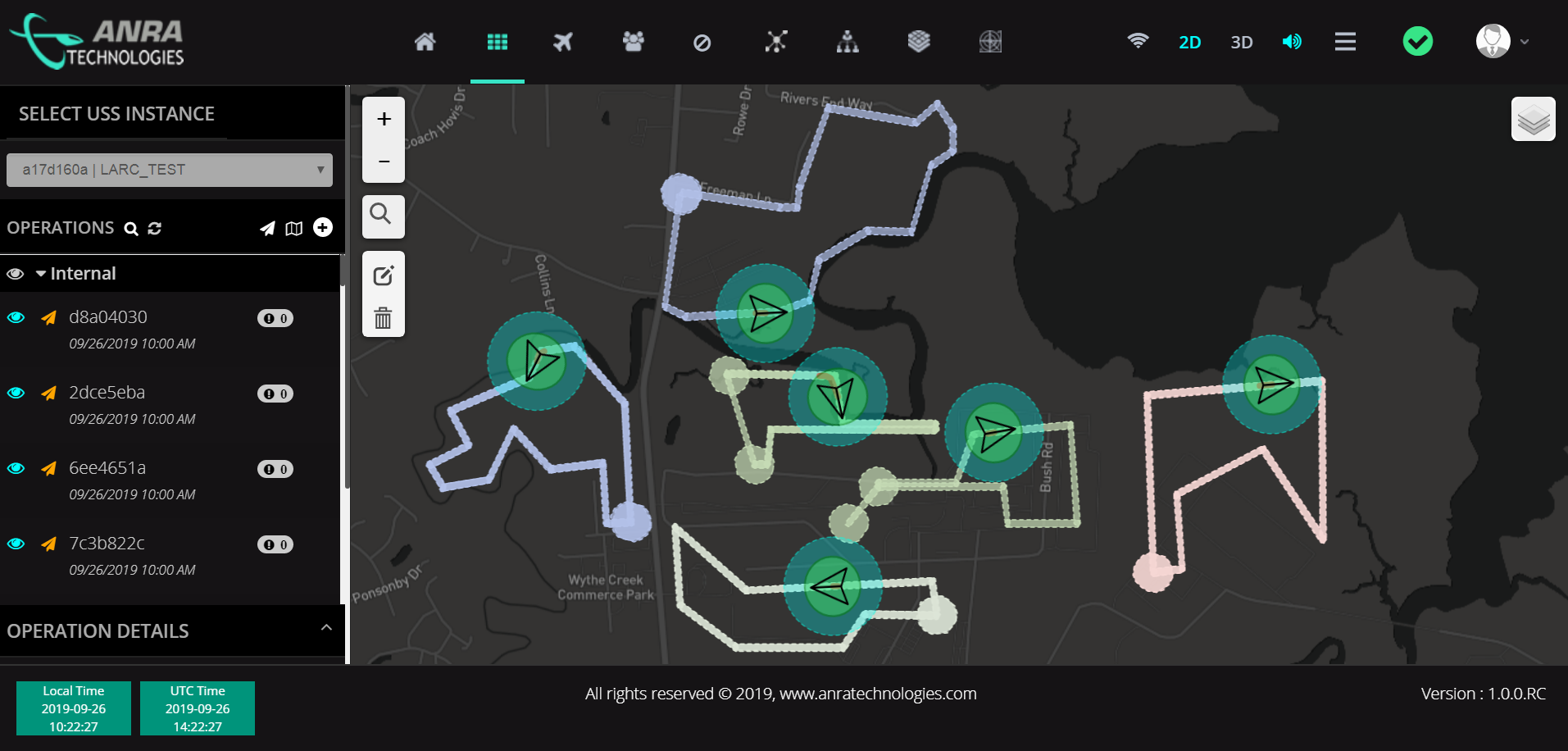
Over the past few months engineers at NASA’s Langley Research Center, in Hampton, Virginia, have been laying the foundation for safe autonomous flight in the national air space through a project called Pathfinder. ANRA is proud to have been associated with this project as the provider of the only UTM platform that powered all these tests.
The NASA team tested things like ICAROUS, which is an autonomous sense and avoid flight management system for unmanned systems, as well as Safe-2-Ditch, which is an autonomous safe landing or autonomous crash management system.
To test this, researchers created incursions, where one drone flies too close to another, and then examined three different means of separation at the City Environment Range Testing for Autonomous Integrated Navigation (CERTAIN) range.
Two forms of responses were evaluated, one is just manual, where the UTM operator has to get engaged and see that there’s an incursion coming and issue a command to maneuver out of the way. Another form of separation that was looked at was called geo-fencing. Geo-fencing works like an invisible wall that can be placed around buildings, power lines and even around the flight path of another vehicle.




The third level of separation is autonomous sense and avoid, engaging another area of ICAROUS. This is used to figure out where a vehicle is going and to establish a route that will maintain a “well-clear separation” that’s needed.
The project also included a Human Factors study analyzing the workload for a remote operator using the GCS as well as the UTM dashboard
More Details can be found at the link below
https://www.nasa.gov/feature/langley/blazing-the-trail-of-urban-traffic-management